General Description
A prototype of a mobile robotic gripper designed to move in two axes (X and Y) through a rail system. On this plane of movement, the gripper can move up, down, open, and close, giving it the ability to manipulate light objects within a determined area. Control is performed manually through a Hall effect joystick and a set of buttons that allow the user to interact simply and intuitively.
The Blitzcrank project was developed as a university course project. The system uses a custom-designed PCB featuring an ESP32 microcontroller running FreeRTOS for real-time task management. The mechanical structure was designed for precision movement across a 2D plane, with a vertical gripper mechanism. The PCB was designed from scratch including the schematic and layout, and manufactured locally.
Personal Contribution
The development of the project was divided into parts and assigned to 4 members. I managed the electronics infrastructure and PCB design. This required me to choose drivers (for motors), cable configurations, as well as passive components to make the project come to life. I was also in charge of the rail movement and building the physical structure, making the software to control the stepper motors.
This project taught me a lot — not only did I learn how to work with electronics, electricity, and complex logic systems through trial and error, but it also taught me that progress takes time and that building something from nothing is not an easy task. Never having worked on a project of this scale with a group showed me that teamwork is essential for tackling this type of problems.
Gallery
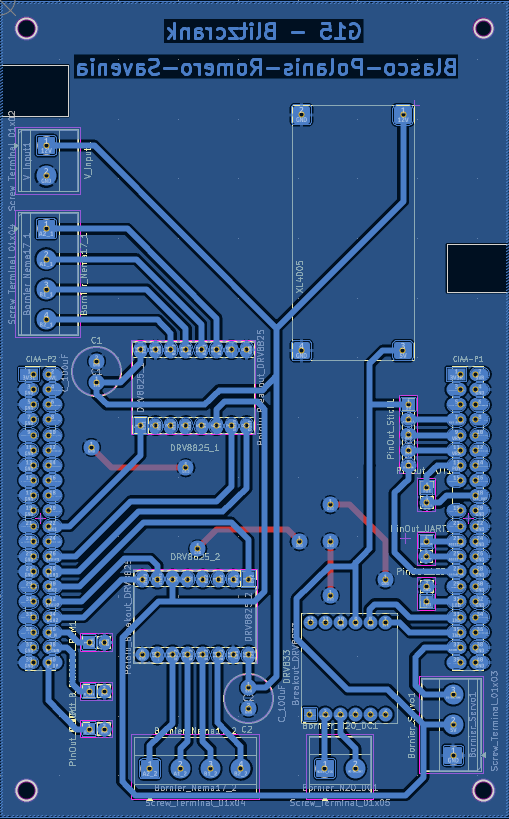
PCB design layout
ESP32 schematic design
Full schematic design
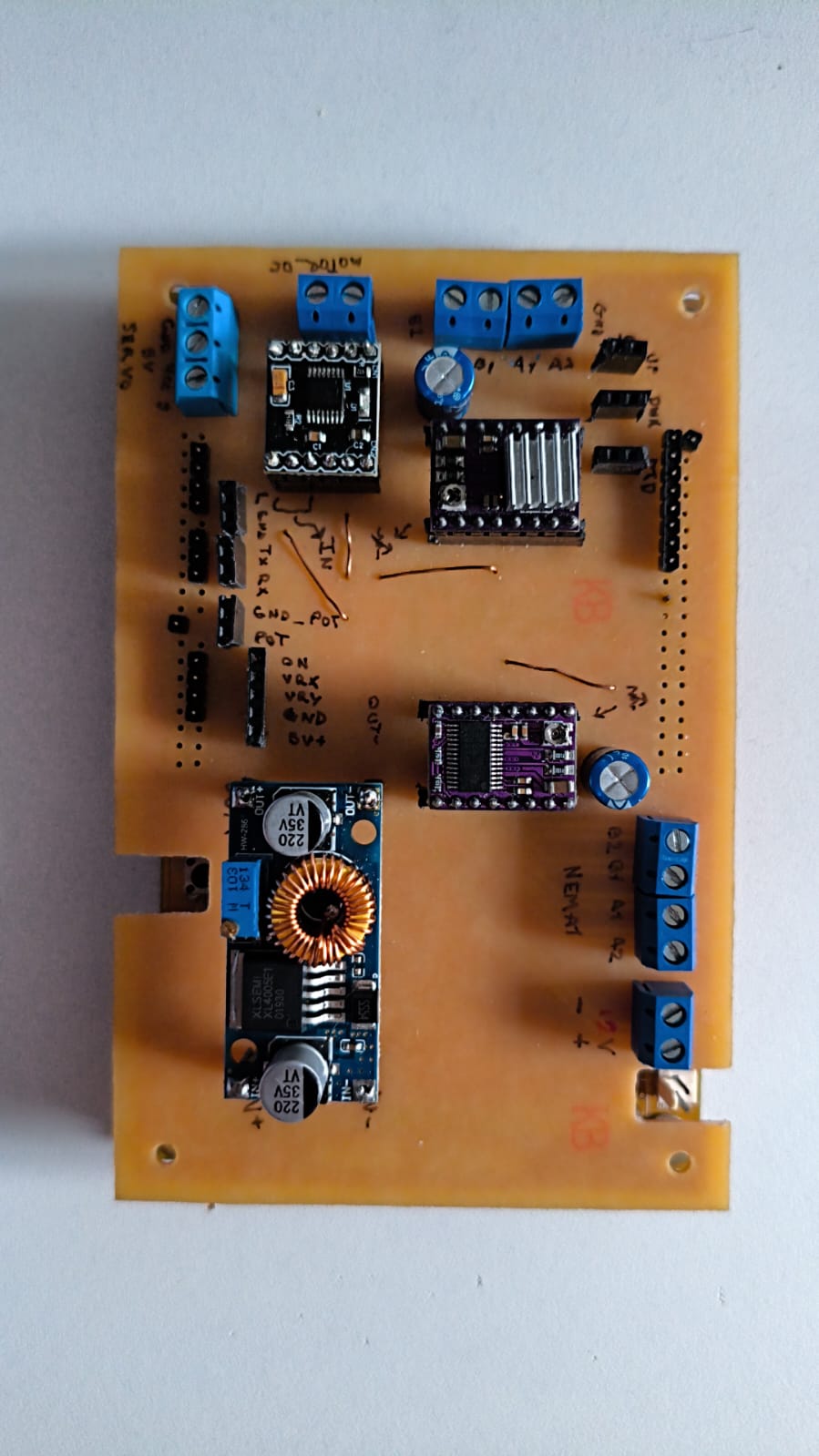
PCB front view
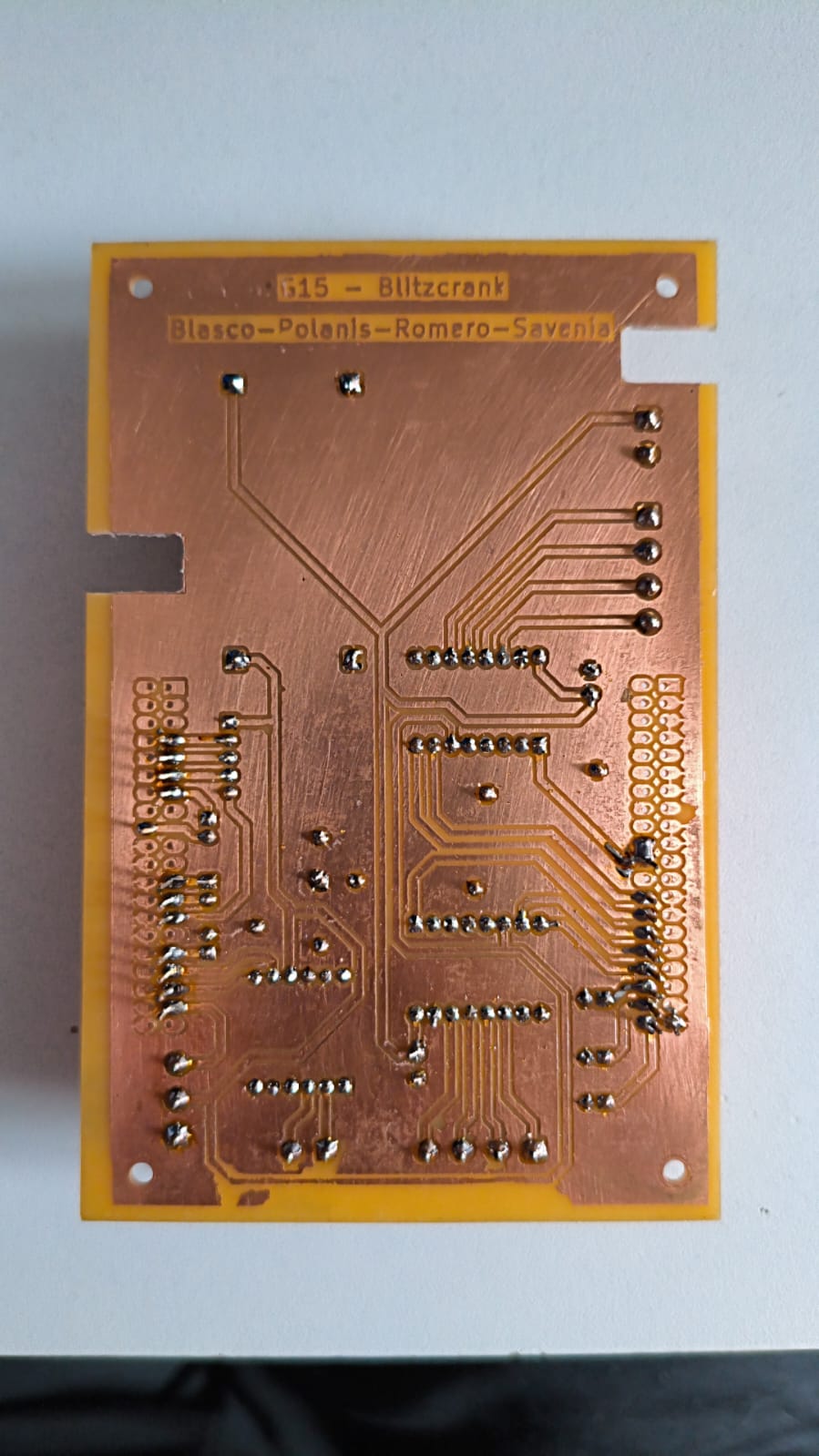
PCB back view
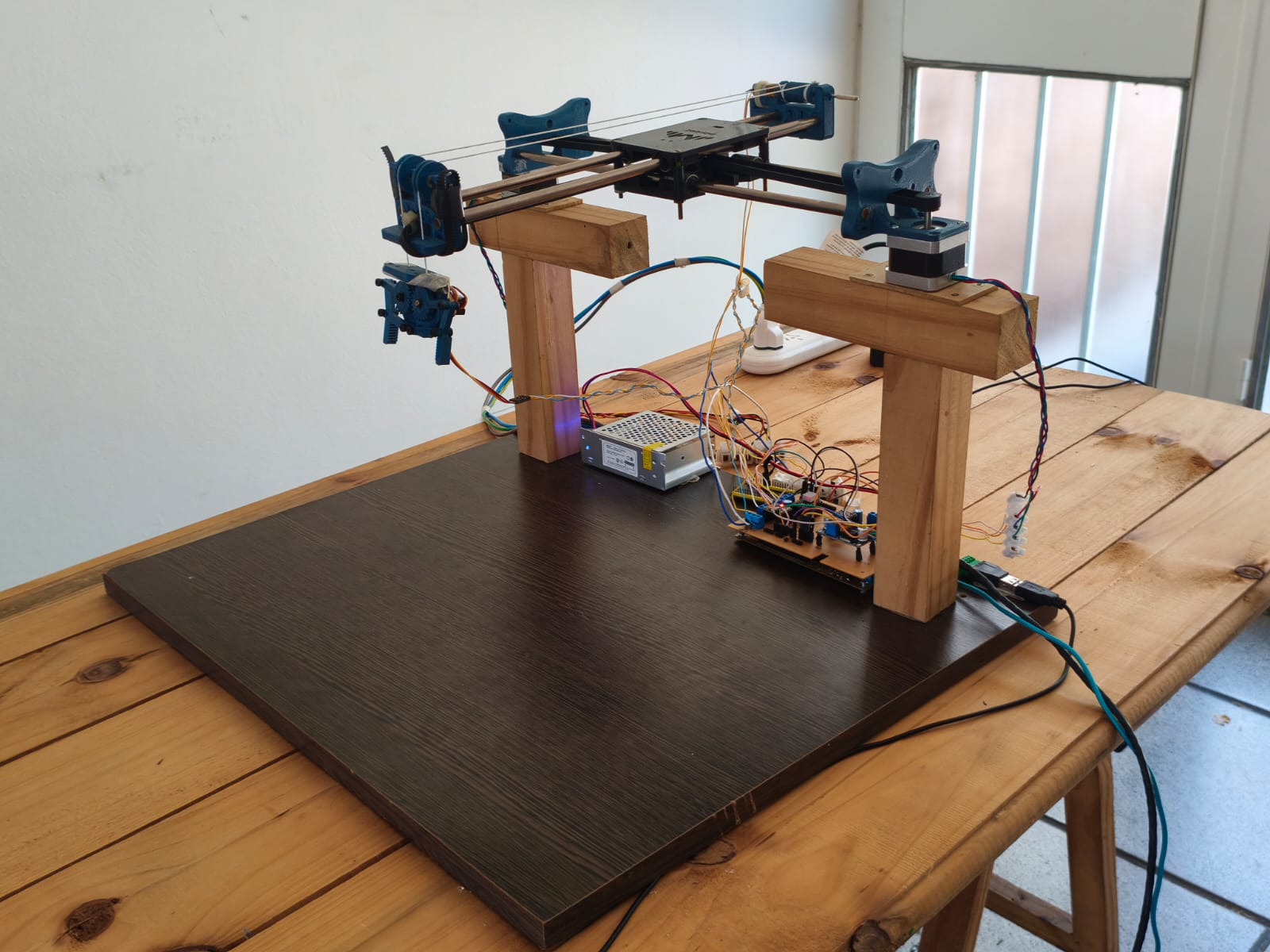
Finished structure

Gripper holding an object