Bipedal Robot
General Description
Bipedal Robot Prototype: This project presents a 3D-printed bipedal robot designed for agile movement. It is powered by an ESP8266 microcontroller paired with an Arduino Motor Shield V2 to manage its multiple servomotors. The robot is controlled remotely through a custom web interface, enabling real-time wireless command execution over a local network.
The robot chassis and joints were fully 3D printed, allowing rapid prototyping and iteration. The ESP8266 hosts a lightweight web server that serves the control interface, where users can trigger predefined movement sequences or manually control individual servos. Movement calibration was performed iteratively to achieve stable bipedal gait patterns.
Personal Contribution
The development of the project was divided into specialized roles among a team of 4 members. I was in charge of the physical structure, assembly, and mechanical maintenance of the robot. This required me to manage the entire hardware integration, from selecting the right fasteners and bearings to ensuring the 3D-printed joints could withstand the torque of the servomotors.
This project was a continuous process of trial and error, especially regarding the mechanical integrity and gait stability. A single loose bearing or a slightly misaligned limb could throw off the entire balance of the robot. This taught me a lot about the precision required in robotics—not just in the code, but in the physical assembly that brings the software to life. It showed me that progress takes time and that maintaining a complex mechanical system is just as critical as the initial build.
Working on a project of this scale with a group showed me that clear communication between the hardware and software teams is essential. Since I was responsible for the physical “body” of the robot, I had to work closely with those handling the ESP8266 logic to ensure the structure could actually execute the movements they programmed.
Gallery
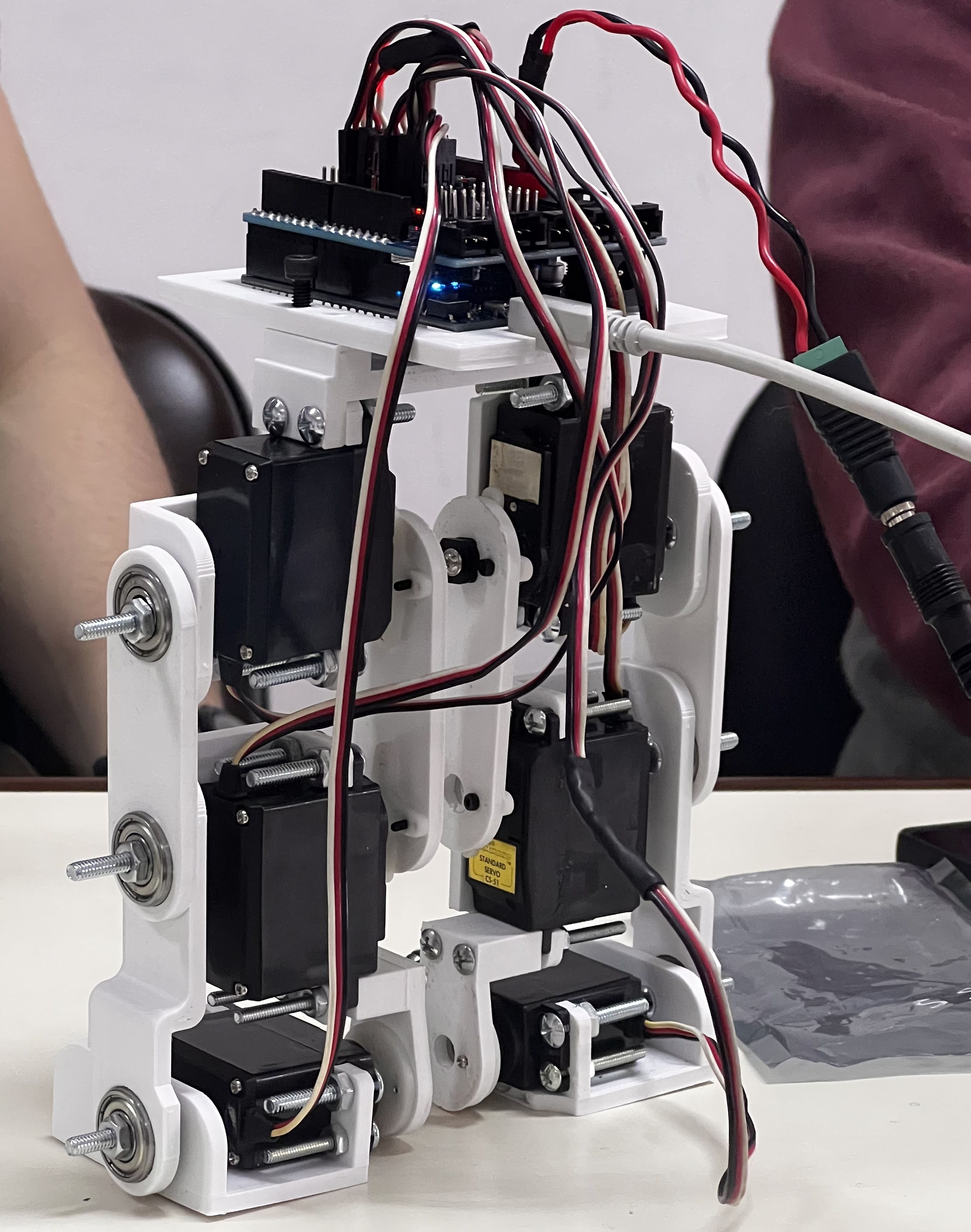
Bipedal robot assembled
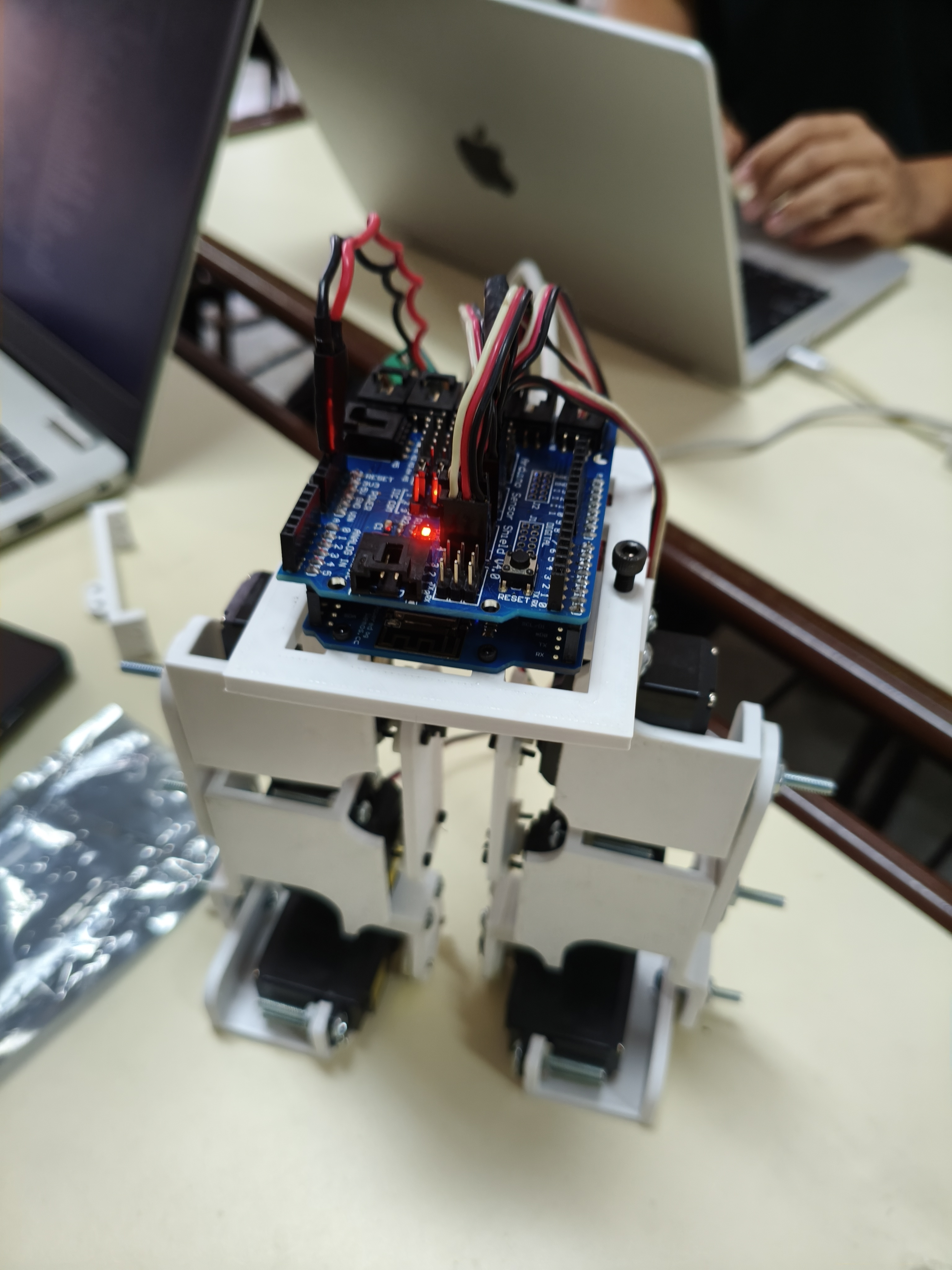
Bipedal robot assembled (Top view)
Walking demonstration